信息瓶颈与在图中的应用
Information Bottleneck又称信息瓶颈,是一个基于信息论的算法。
Information Bottleneck
最早来自2000年Naftali Tishby等人的的《The information bottleneck method》
具体来说,它试图优化以下两个目标:
- 压缩性 (Compression):压缩表示T应该包含尽可能少的关于原始变量X的信息。这通过最小化互信息 I(X;T) 来实现。
- 相关性 (Relevance):压缩表示T应该尽可能多地保留关于相关变量Y的信息。这通过最大化互信息 I(T;Y) 来实现。
故信息瓶颈可以表示为一个带权衡参数 β 的优化问题,最大化:
$$
L[p(t∣x)]=I(T;Y)-βI(X;T)
$$
Variational Information Bottleneck
难点在于互信息很难计算。所以,我们需要使用变分推理来近似它们。
在VIB中,通常会构建一个编码器 (Encoder) $p_\theta(z|x)$和一个解码器/预测器 (Decoder/Predictor)$q_\theta(y|z)$,其中:
- 编码器$p_\theta(z|x)$:由神经网络参数化(参数为 θ),将输入X映射到一个潜在的随机表示Z(即瓶颈T)。这个潜在表示通常被设计为遵循一个先验分布,比如标准正态分布 r(z)=N(0,I)。
- 解码器/预测器$q_\theta(y|z)$:也由神经网络参数化(参数为 $\phi$),根据潜在表示Z来预测目标变量Y。
即最大化:
$$
\mathcal{L} _ {IB}[p(z|x)] = I(Z;Y) - \beta I(X;Z)
$$
其中:
- $I(Z;Y)$ 是Z和Y之间的互信息,越大越好。
- $I(X;Z)$ 是X和Z之间的互信息,越小越好(通过$\beta$来权衡)。
- $\beta > 0$ 是拉格朗日乘子,控制压缩程度和保留相关信息之间的平衡。
但是直接计算和优化这两个互信息项非常困难,主要原因如下:
- $I(Z;Y)$ 的计算:
$$
I(Z;Y) = \mathbb{E} _ {p(z,y)} \left[ \log \frac{p(z,y)}{p(z)p(y)} \right] = H(Y) - H(Y|Z)
$$
其中 $H(Y)$ 是Y的熵(通常是常数,不影响优化),而 $H(Y|Z) = - \mathbb{E} _ {p(z)} \left[ \mathbb{E} _ {p(y|z)} [\log p(y|z)] \right]$。
要计算 $p(y|z)$,我们需要知道从Z到Y的真实条件概率,这在复杂模型中是未知的。而且,即使知道了 $p(y|z)$,计算期望也可能涉及难以处理的积分。边缘分布 $p(z) = \int p(z|x)p(x)dx$ 的计算也可能非常复杂。
- $I(X;Z)$ 的计算:
$$
I(X;Z) = \mathbb{E} _ {p(x,z)} \left[ \log \frac{p(x,z)}{p(x)p(z)} \right] = H(Z) - H(Z|X)
$$
这里同样涉及到难以计算的边缘分布 $p(z)$ 和条件熵 $H(Z|X) = - \mathbb{E} _ {p(x)} \left[ \mathbb{E} _ {p(z|x)} [\log p(z|x)] \right]$。对于连续高维的Z,或者当 $p(z|x)$ 是一个复杂的神经网络时,$p(z)$ 的计算和期望的计算都非常棘手。
变分推断的引入
变分推断的核心思想是,当直接处理一个复杂的概率分布或量(如互信息)很困难时,我们引入一个更简单、更易于处理的变分分布(通常带有可学习的参数),并优化这个变分分布来逼近我们感兴趣的真实分布或量。
在VIB中,我们主要对 $I(Z;Y)$ 和 $I(X;Z)$ 进行变分近似。
1. 近似 $I(Z;Y)$ (保留相关信息项)
我们希望最大化 $I(Z;Y) = H(Y) - H(Y|Z)$。由于 $H(Y)$ 相对于编码器 $p(z|x)$ 是常数,所以最大化 $I(Z;Y)$ 等价于最小化条件熵 $H(Y|Z)$。
$$
H(Y|Z) = - \mathbb{E} _ {p(z,y)}[\log p(y|z)] = - \mathbb{E} _ {p(x)p(y|x)p(z|x)}[\log p(y|z)]
$$
这里的 $p(y|z)$ 是真实的从Z到Y的后验概率,我们通常不知道它。因此,我们引入一个变分近似分布 $q _ {\phi}(y|z)$,这是一个由参数 $\phi$(例如神经网络的权重)控制的、试图从Z预测Y的模型。
我们可以推导出 $I(Z;Y)$ 的一个变分下界 (Variational Lower Bound):
$$
I(Z;Y) = H(Y) - H(Y|Z)
$$
$$
H(Y|Z) = - \mathbb{E} _ {p(z)} [ \sum_y p(y|z) \log p(y|z) ]
$$
我们知道 $KL(p(y|z) || q _ {\phi}(y|z)) \ge 0$,即 $\mathbb{E} _ {p(y|z)}[\log \frac{p(y|z)}{q _ {\phi}(y|z)}] \ge 0$
所以
$$
\mathbb{E} _ {p(y|z)}[\log p(y|z)] \ge \mathbb{E} _ {p(y|z)}[\log q _ {\phi}(y|z)]
$$
因此,
$$
-H(Y|Z) \ge \mathbb{E} _ {p(z)} [ \mathbb{E} _ {p(y|z)}[\log q _ {\phi}(y|z)] ]
$$
或者说,
$$
H(Y|Z) \leq - \mathbb{E} _ {p(z,y)}[\log q _ {\phi}(y|z)]
$$
所以,
$$
I(Z;Y) \ge H(Y) + \mathbb{E} _ {p(z,y)}[\log q _ {\phi}(y|z)]
$$
由于 $H(Y)$ 是常数,最大化 $I(Z;Y)$ 的下界就等价于最大化 $\mathbb{E} _ {p(z,y)}[\log q _ {\phi}(y|z)]$,或者说最小化负对数似然 $-\mathbb{E} _ {p(z,y)}[\log q _ {\phi}(y|z)]$。这个期望可以写作:
$$
\mathbb{E} _ {p(x)p(y|x)} [ \mathbb{E} _ {p _ {\theta}(z|x)} [\log q _ {\phi}(y|z)] ]
$$
这一项实际上就是训练一个从Z预测Y的模型(解码器/预测器 $q _ {\phi}(y|z)$)时的标准监督学习损失(例如,对于分类问题是交叉熵,对于回归问题是均方误差的负数)。我们希望通过学习编码器 $p _ {\theta}(z|x)$(参数为 $\theta$)和解码器 $q _ {\phi}(y|z)$ 来最大化这个下界。
2. 近似 $I(X;Z)$ (压缩信息项)
我们希望最小化 $I(X;Z)$。
$$
\begin{align}
I(X;Z) = H(Z) - H(Z|X)
\\
H(Z|X) = - \mathbb{E} _ {p(x)} \left[ \int p _ {\theta}(z|x) \log p _ {\theta}(z|x) dz \right]
\\
H(Z) = - \int p(z) \log p(z) dz
\end{align}
$$
其中 $p(z) = \int p _ {\theta}(z|x) p(x) dx$。
直接计算 $p(z)$ 非常困难。VIB在这里引入另一个固定的、简单的先验分布 $r(z)$ (例如,标准正态分布 $\mathcal{N}(0,I)$)。然后,目标是将 $p(z)$ 推向 $r(z)$。
我们可以利用KL散度的性质:
$$
\begin{align}
I(X;Z)&=\mathbb{E} _ {p_(x,z)} [ \log \frac{p _ {\theta}(z|x)p(x)}{p(x)p(z)}]
\\&= \mathbb{E} _ {p(x)} [ \mathbb{E} _ {p _ {\theta}(z|x)} [ \log \frac{p _ {\theta}(z|x)}{p(z)} ] ]
\\&= \mathbb{E} _ {p(x)} [KL(p _ {\theta}(z|x) || p(z))]
\\&=\mathbb{E} _ {p(x)}[\int p _ {\theta}(z|x) \log \frac{p _ {\theta}(z|x)}{p(z)} dz]
\\&=\mathbb{E} _ {p(x)}[ \int p _ {\theta}(z|x) \log \left( \frac{p _ {\theta}(z|x)}{r(z)} \cdot \frac{r(z)}{p(z)} \right) dz]
\\&=\mathbb{E} _ {p(x)}[ \int p _ {\theta}(z|x) \left( \log \frac{p _ {\theta}(z|x)}{r(z)} + \log \frac{r(z)}{p(z)} \right) dz]
\\&=\mathbb{E} _ {p(x)}[\int p _ {\theta}(z|x) \log \frac{p _ {\theta}(z|x)}{r(z)} dz+\int p _ {\theta}(z|x) \log \frac{r(z)}{p(z)} dz]
\\&=\mathbb{E} _ {p(x)}[KL(p{\theta}(z|x) || r(z))+\mathbb{E}{p _ {\theta}(z|x)} \left[\log \frac{r(z)}{p(z)}\right]]
\end{align}
$$
而
$$
\begin{align}
\mathbb{E} _ {p(x)}\left[\mathbb{E}{p _ {\theta}(z|x)} \left[\log \frac{r(z)}{p(z)}\right]\right]&=\mathbb{E}{p(x,z)} \left[\log \frac{r(z)}{p(z)}\right]
\\&=\int_z \int_x p(x)p_\theta(z|x)log\frac{r(z)}{p(z)}dxdz
\\&=\int_z \left(\int_x p(x)p_\theta(z|x)dx\right)log\frac{r(z)}{p(z)}dz
\\&=\int_z p(z)log\frac{r(z)}{p(z)}dz
\\&=-KL(p(z)||r(z))
\end{align}
$$
故利用非负性即有:
$$
I(X;Z) \le \mathbb{E} _ {p(x)}[KL(p _ {\theta}(z|x) || r(z))]
$$
一个更直接且在VIB论文中被采用的思路是,我们希望 $Z$ 尽可能独立于 $X$,同时又保留预测 $Y$ 所需的信息。如果 $Z$ 对 $X$ 的依赖性很小,那么 $p _ {\theta}(z|x)$ 对于不同的 $x$ 应该看起来都差不多,并且都接近某个简单的先验 $r(z)$。因此,我们直接将 $I(X;Z)$ 替换为一个可以计算的上界或一个相关的量,即 $\mathbb{E} _ {p(x)}[KL(p _ {\theta}(z|x) || r(z))]$。
当 $r(z)$ 是一个固定的先验分布时,最小化 $\mathbb{E} _ {p(x)}[KL(p _ {\theta}(z|x) || r(z))]$ 会迫使编码器 $p _ {\theta}(z|x)$ 的输出(对于所有x)都接近这个先验 $r(z)$。这就限制了Z中能包含的关于X的特定信息量,从而达到了压缩的目的。
组合得到最终的VIB目标函数
将上述两部分的近似代入原始IB目标 $\max [I(Z;Y) - \beta I(X;Z)]$,我们得到VIB的目标(通常是最小化其负值):
最小化
$$
\mathcal{L} _ {VIB}(\theta, \phi) = \mathbb{E} _ {p(x)p(y|x)} \left[ - \mathbb{E} _ {p _ {\theta}(z|x)}[\log q _ {\phi}(y|z)] + \beta KL(p _ {\theta}(z|x) || r(z)) \right]
$$
这里:
- 第一项 $-\mathbb{E} _ {p _ {\theta}(z|x)}[\log q _ {\phi}(y|z)]$ 是预测损失(或重构损失,取决于任务)。我们希望它小,对应于最大化 $I(Z;Y)$ 的下界。
- 第二项 $KL(p _ {\theta}(z|x) || r(z))$ 是压缩损失或正则化项。我们希望它小,对应于最小化(或约束)$I(X;Z)$。
- $p _ {\theta}(z|x)$ 是编码器网络,将输入X映射到潜在表示Z的分布。
- $q _ {\phi}(y|z)$ 是解码器/预测器网络,从Z预测Y。
- $r(z)$ 是一个预先选择的简单先验分布(例如,$\mathcal{N}(0,I)$)。
- $\beta$ 是权衡这两个损失项的超参数。
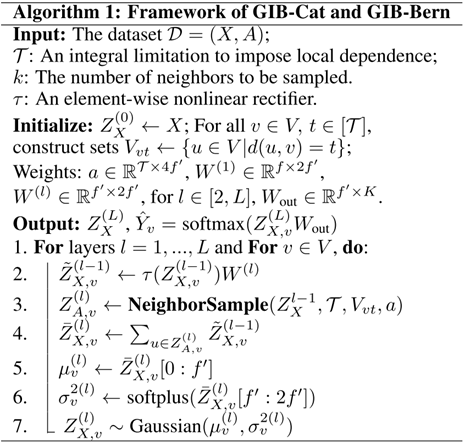
Graph Information Bottleneck
我们希望一个好的图表示是鲁棒的、稳定的,并且拥有迁移的能力。具体来说,我们希望即使数据出现了分布漂移或者受到人为的扰动后,好的图表示仍然可拥有之前所述的性质。我们给出的核心想法是:一个好的图表示需要捕捉最少充分信息量minimal sufficient information。
于是我们使用信息瓶颈,类似地:
$$
\min _ {\mathbb{P}\left(Z _ {X}^{(L)} \mid \mathcal{D}\right) \in \Omega} \operatorname{GIB} _ {\beta}\left(\mathcal{D}, Y ; Z _ {X}^{(L)}\right) \triangleq\left[-I\left(Y ; Z _ {X}^{(L)}\right)+\beta I\left(\mathcal{D} ; Z _ {X}^{(L)}\right)\right]
$$
同样地,我们要推出上下界:
$$
I\left(Y ; Z _ {X}^{(L)}\right) \geq 1+\mathbb{E}\left[\log \frac{\prod _ {v \in V} \mathbb{Q} _ {1}\left(Y _ {v} \mid Z _ {X, v}^{(L)}\right)}{\mathbb{Q} _ {2}(Y)}\right]+\mathbb{E} _ {\mathbb{P}(Y) \mathbb{P}\left(Z _ {X}^{(L)}\right)}\left[\frac{\prod _ {v \in V} \mathbb{Q} _ {1}\left(Y _ {v} \mid Z _ {X, v}^{(L)}\right)}{\mathbb{Q} _ {2}(Y)}\right]
$$
$$
I\left(\mathcal{D} ; Z _ {X}^{(L)}\right) \leq I\left(\mathcal{D} ;\left\{Z _ {X}^{(l)}\right\} _ {l \in S _ {X}} \cup\left\{Z _ {A}^{(l)}\right\} _ {l \in S _ {A}}\right) \leq \sum _ {l \in S _ {A}} \mathrm{AIB}^{(l)}+\sum _ {l \in S _ {X}} \mathrm{XIB}^{(l)},
$$
其中
$$
\mathrm{AIB}^{(l)}=\mathbb{E}\left[\log \frac{\mathbb{P}\left(Z _ {A}^{(l)} \mid A, Z _ {X}^{(l-1)}\right)}{\mathbb{Q}\left(Z _ {A}^{(l)}\right)}\right], \mathrm{XIB}^{(l)}=\mathbb{E}\left[\log \frac{\mathbb{P}\left(Z _ {X}^{(l)} \mid Z _ {X}^{(l-1)}, Z _ {A}^{(l)}\right)}{\mathbb{Q}\left(Z _ {X}^{(l)}\right)}\right]
$$
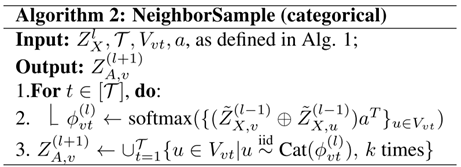
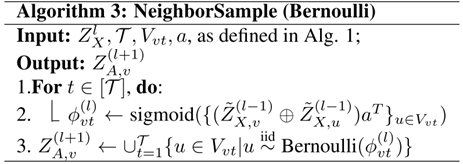
作者提出了GIB-cat和GIB-Bern分别对应不同的边分布。
GIB-cat假设:
$$
Z _ {A, v}=\cup _ {t=1}^{\mathcal{T}}\left\{u \in V _ {v t} \mid u \stackrel{\text { iid }}{\sim} \operatorname{Cat}\left(\frac{1}{\left|V _ {v t}\right|}\right)\right\}
$$
GIB-Bern假设:
$$
Z _ {A, v}=\cup _ {t=1}^{\mathcal{T}}\left\{u \in V _ {v t} \mid u \stackrel{\text { iid }}{\sim}Bernoulli(\alpha)\right\}
$$
AIB的经验估计为:
$$
\widehat{\mathrm{AIB}}^{(l)}=\mathbb{E} _ {\mathbb{P}\left(Z _ {A}^{(l)} \mid A, Z _ {X}^{(l-1)}\right)}\left[\log \frac{\mathbb{P}\left(Z _ {A}^{(l)} \mid A, Z _ {X}^{(l-1)}\right)}{\mathbb{Q}\left(Z _ {A}^{(l)}\right)}\right]
$$
对于XIB,假设$Z _ {X, v} \sim \sum _ {i=1}^{m} w _ {i} \operatorname{Gaussian}\left(\mu _ {0, i}, \sigma _ {0, i}^{2}\right)$,则
$$
\widehat{\mathrm{XIB}}^{(l)}=\log \frac{\mathbb{P}\left(Z _ {X}^{(l)} \mid Z _ {X}^{(l-1)}, Z _ {A}^{(l)}\right)}{\mathbb{Q}\left(Z _ {X}^{(l)}\right)}=\sum _ {v \in V}\left[\log \Phi\left(Z _ {X, v}^{(l)} ; \mu _ {v}, \sigma _ {v}^{2}\right)-\log \left(\sum _ {i=1}^{m} w _ {i} \Phi\left(Z _ {X, v}^{(l)} ; \mu _ {0, i}, \sigma _ {0, i}^{2}\right)\right)\right]
$$
代码
Robust Graph Information Bottleneck
NIPS2023
用来应对双边图结构噪声